- 0438 310 585
- info@principia.com.au

Global positioning systems (GPS) have become so integrated in our lives that it is almost in everyday practise, whether it’s finding out how to drive to a mates, or calculating how far you’ve run during your daily exercise session. It is one of those technologies that we don’t think twice about (and get annoyed when it doesn’t work). It is a rather remarkable technology actually, that we sometimes take for granted. It essentially requires a receiver, where its position is triangulated by satellites that fly thousands of kilometres above the ground in orbit with the earth. It is important to note that GPS is but one of many systems as part of a Global Navigation Satellite System (GNSS).
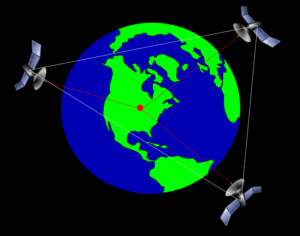 Figure 1: Triangulation of a receiver from multiple satellites enabling its position to be determined
Figure 1: Triangulation of a receiver from multiple satellites enabling its position to be determined
Without going into too much detail, each GPS satellite continuously transmits a radio signal containing its position and time on an atomic clock, the time delay between the satellite clock reading and the receiver clock reading upon receiving the radio signal can be used to calculate their distance apart. When a GPS receiver monitors multiple satellites (Figure 1), a system of equations can be solved to calculate the latitude, longitude and elevation, from which we know its position in the world. Still with me? Good, now we can talk about practical use of it, as well as how it can be integrated with other motion technologies.
Aside from it being used to pinpoint locations, it has a massive benefit in sporting populations and over the last decade, has played a foundational role in both training and game environments. Position, velocity and acceleration can all be calculated from GPS, why is that important? Well each of these motion parameters holds valuable information. Total distance can be used as a measure of the total load on an athlete. Velocities can be used in game analysis to show how much high speed running and low speed running has occurred. Many GPS studies of team sport athletes have shown that games consist of clusters of short high-speed efforts interspersed with lower speeds. This has changed the way we condition team sport athletes nowadays, with more of an emphasis on sprint repeatability and phosphocreatine regeneration (but we won’t go into this here). Accelerations further tell us how much high-speed sprinting is needing to be performed, which creates greater energy demands and along with change of direction indicates loading on the body.
All of the parameters come together to not only deliver a bunch of data, but give us valuable information on validating and guiding training and recovery. Furthermore, it can be combined with heart rate data, to give us physiological implications, we can see when athletes are approaching their limits, and when they are showing fatigue. I could write so much more on the physiology, but I will leave it at that for the moment, as the scope of this article is in the underlying technology.
The next integration I want to discuss is with inertial based technologies, which is something that gives me a great deal of excitement. Inertial motion capture as I discussed in the previous article on IMU’s, gives a complete portable method of tracking human movement outside of a laboratory by enabling the orientations of body segments to be analysed. A typical limitation of inertial motion capture is positional drift with respect to the global origin over time. Many people fail to realise the difference between sensor based calculation of position and optical measurement of position. With inertial methods, 3D position is calculated by using the orientations of all of the segments in the linked segment model and in turn, calculates the postures in between foot contacts with respect to a global origin. What this means is that, applications without defined foot contacts such as cycling, skating (Figure 2), skiing, kayaking and many vehicle based scenarios are unable to extract a global position. However, GPS has the ability to address these shortcomings, through the integration of a positional measurement to inform the position and heading of the model.
 Figure 2: Analysis of a skater, a movement with sliding foot contact rather than defined contact
Figure 2: Analysis of a skater, a movement with sliding foot contact rather than defined contact
The integration of GPS with IMU’s was recently done by Xsens technologies and is a huge step in motion tracking technology in my opinion. It enables outdoor motion applications to be analysed a great deal further, establishing associations between the humans global movement with data of their body segments and joint angles. The possibilities are simply endless, and has the ability to bring new insights into many different sports and activities as we can now follow the athlete out in their natural environment. We now know how their bodies are moving and how they are moving with respect to the outside world.